
我是 傻狗與AI,本期我帶你拆解特斯拉在 10 月 12 日凌晨推送的 FSD v14.1.1:從實測表現、鮮為人知的技術跳躍,到為 Robotaxi 商業化鋪路的戰略信號,以及馬斯克在其他戰線的佈局。這一集重點是「為什麼特斯拉能在 5 天內從 14.1 推到 14.1.1?背後的資料、架構與部署流程,代表了什麼戰略意義」。
Table of Contents
- 目錄
- 第一部分:五天修復的真實表現
- 第二部分:鮮為人知的技術躍遷
- 第三部分:Robotaxi 的底層鋪墊與全球測試
- 第四部分:馬斯克的多線戰爭(X、生態整合與車型擴張)
- 結語:為什麼 5 天很關鍵?
- 常見問題(FAQ)
目錄
- 第一部分:14.1.1 的真實表現(路測與使用者回報)
- 第二部分:鮮為人知的技術躍遷(模型、上下文與集體視覺)
- 第三部分:Robotaxi 商業化的底層鋪墊(全球測試與產品設計)
- 第四部分:馬斯克的多線作戰(X、Model Y 標準版、監管節奏)
- FAQ:常見問題速答
第一部分:五天修復的真實表現
10 月 12 日,使用者尼克·克魯茲·帕塔尼(Nick Cruz Patani)在洛杉磯完成 7 次測試駕駛,全程零干預:路線涵蓋停車場、快速道路、環島與兩個禁止紅燈右轉的路口。最讓人印象深刻的片段是系統遇到超過 100 名騎行者佔據車道時,自動切換到轉彎車道繞行,毫無遲疑。
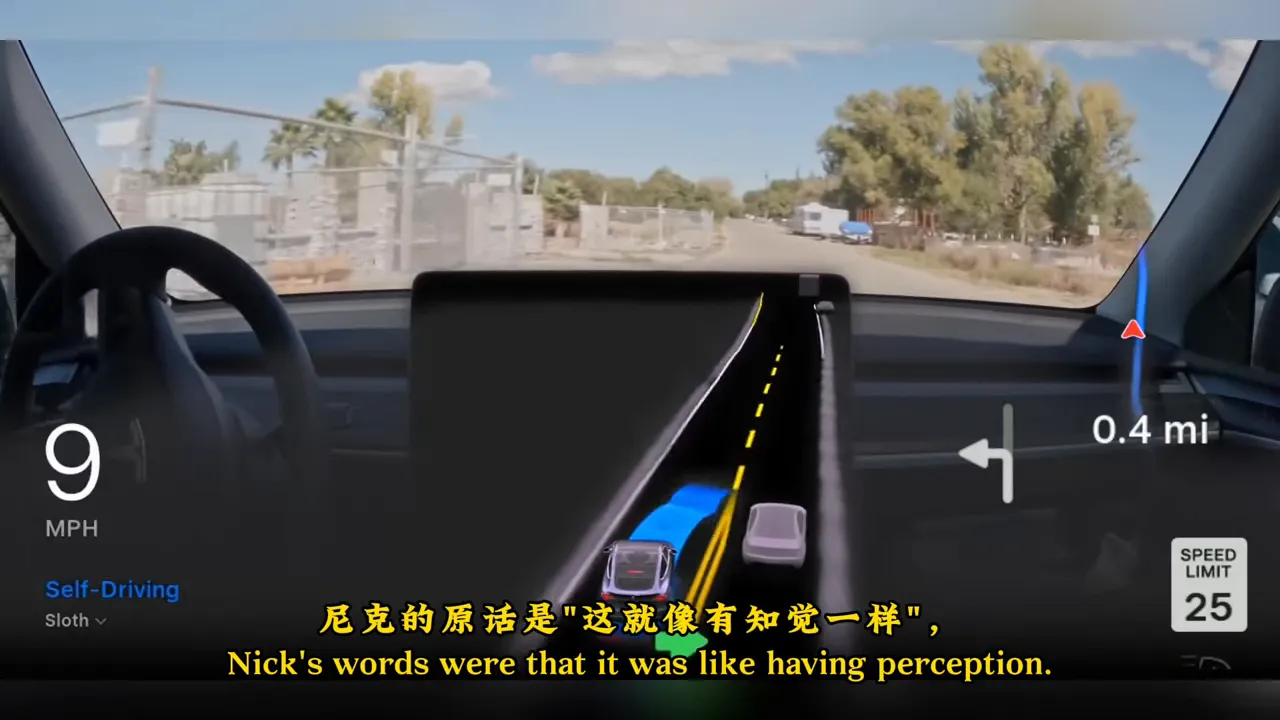
「這就像有知覺一樣。」
另一位測試者索耶·梅里特(Soyer Merritt)回報系統在夜間完美避開一隻兔子,當下他自己完全沒看到那隻動物,卻被 FSD 預先偵測並避讓。

「FSD14.1.1今晚救了這只兔子的命,我完全沒看到它。」
這些片段說明幾點關鍵能力:
- 系統反應速度已經能超越人眼在暗光下的生理反應(人眼暗光反應約 0.4 秒,神經網路可在 ~0.1 秒辨識與判斷)。
- 14.1 版本明顯存在的「方向盤劇烈擺動」與「過度頻繁剎車」的問題,在 14.1.1 中有顯著改善,剎車抖動明顯減少,但整體平順性仍被部分資深使用者認為略落後於 13.x 的舒適設定。
- 社群出現分歧:有人認為已可擴大推送(更強的能力),也有人建議暫緩(追求更高的平順性)。這反映出一個核心權衡:能力(處理罕見場景)vs. 舒服度(乘坐平順)。
第二部分:鮮為人知的技術躍遷
如果你只把注意力放在「剎車更平順」就錯過了 14 系列真正的革命。以下是幾個技術要點,能解釋為何 14.1.1 在處理罕見與複雜場景有明顯進步:
1) Arwen Predictive Layer(城市預測層)
這是基於數百萬次人類微決策訓練出來的預測模型,不是靠硬性規則,而是學會人類「潛意識」的駕駛習慣。舉例:在學校區域人類駕駛會下意識減速,即使沒有看到限速標誌;Arwen 可以透過視覺識別學校建築或兒童活動的情景,觸發減速行為。
2) 上下文窗口大幅擴展(時序記憶)
14 版本的參數量約為 13 版本的 10 倍,但更重要的是上下文窗口擴大了三倍,意味著系統可以「記住」過去 1 分鐘內發生的事,而不是只有幾秒鐘。駕駛是一個時序推理問題:看到路邊猶豫的行人、車輛行為的軌跡與環境變化,需要時間維度的記憶來預判下一步,這次提升讓系統更有情境理解力。

3) 集體視覺架構與「Zoken」
E4 架構允許每輛車上傳微量的「場景 token(Zoken)」到雲端,例如:施工手勢、左車道封閉、特定標誌的臨時配置。這些壓縮後的場景資料在雲端形成動態行為地圖,當你遇到類似場景時,車輛不是單靠自身經驗學習,而是調用全球車隊的集體經驗。

內部稱這套系統為 Acelon Link,搭配類星鏈(Starlink)達到低於 20ms 的同步延遲。重要的是,訓練不再直接把使用者的每次「失誤」當作訓練資料,而是透過「逃逸速度機制」過濾:當安全干預率接近或超過人類水平時,該場景才會被接納為訓練資料。文件預測 14.2 的安全性能達到人類的 2–3 倍,這才是 E4 的核心秘密:從單車智能到車隊級的集體智能。
第三部分:Robotaxi 的底層鋪墊與全球測試
10 月 11 日日本國土交通省(MLIT)證實特斯拉在日本公路上做端到端自動駕駛測試;同日亞利桑那州 Gilbert 出現疑似 RoboTaxi 的驗證車。這兩個事件並非巧合:
- 日本路況密度高、路幅窄(交通密度約為美國三倍,道路寬度約 60%),若能在日本通過驗證,全球多數城市路況的技術障礙就大幅降低。
- Gilbert(靠近鳳凰城)已是其他無人車服務(如 MEMO)的實際營運場域,特斯拉選在這裡測試代表它要直接對標現有商業服務的品質。
另外,14.1 新增的 Hile Options 功能(可選停車場、路邊、私人車道、車庫等精確下車位置)明顯不是為一般消費者設計,而是為 Robotaxi 精確上下客場景預備。測試影片展示系統能自動找車位倒入庫、路邊停靠精準對齊人行道,甚至在未事先標註地圖的情況下從停車場起點順利導航抵達超充站。

時間表顯示 14.2 預計在 10 月底、14.3 在 11 月,照這節奏特斯拉有望在第四季達成「關鍵的可靠度躍升」。為何這麼重要?一旦系統穩定到無需人類監督並通過監管,Robotaxi 的商業化會徹底改變特斯拉的估值邏輯:從賣車到賣出行服務。
依照馬斯克過去規劃,每輛 RoboTaxi 每年可帶來約 3 萬美元收入,若 2026 年部署 100 萬輛,將成為 300 億美元的年化業務。當然,前提是安全與監管先過關。
第四部分:馬斯克的多線戰爭(X、生態整合與車型擴張)
在 FSD 閃電迭代的同時,馬斯克也在推動 X 應用的重建與生態整合:他轉發了 X 安卓下載量創歷史新高的推文,並公開招募安卓高階工程師。短句回覆「Almost there」表面上在說 X,但結合 FSD / Robotaxi 的時程,很可能在暗示更大的願景:
- 想像 Robotaxi 上線後:用戶透過 X 叫車、用 X 的金融服務支付、車內由 X 提供內容體驗——一個從出行到社交再到支付的閉環生態。
- Model Y 標準版在加拿大出現測試車(搭載 Hubble U4 硬體,能執行 FSD14),意味著走量車型將快速擴充具備新硬體的車隊,資料飛輪會進一步加速。
- 特斯拉已在推廣 ADAS 主動安全功能作為每輛車的標配,這不只是技術宣傳,也是在為監管鋪路:當主動安全成為標配,法規接受完全自動駕駛的阻力會降低。

把這些蛛絲馬跡串起來:14 系列的快速迭代、日本與 Gilbert 的測試、X 的重建、Model Y 標準版的地理擴張,指向一個共同時間窗:2025 年第四季 是相對可能的商業化與監管突破節點(比市場預期提前至少半年以上)。
結語:為什麼 5 天很關鍵?
從 14.1 到 14.1.1 只用了 5 天,這不只是工程速度的展示,而是工業化迭代能力的證明:大規模車隊資料、快速定位場景、在雲端完成模型優化並透過 OTA 推送修復,形成真正的「閉環」。特斯拉能把傳統車廠需要 6–12 個月的 OTA 循環壓縮到一周內,代表他們已把資料、模擬與驗證流程流水線化。
當然,仍有挑戰:平順性、在模糊場景時的決策自信、監管合規與大規模商業化測試。這些正是未來幾個版本(14.2、14.3)要持續攻克的重點。
總結一句話:14.1.1 不只是小修小補,背後是上下文記憶、城市預測層與車隊集體智慧的初步落地;如果接下來幾版能持續改善平順性並通過更多法規驗證,Robotaxi 的商業化就真的不是夢了。
常見問題(FAQ)
Q1:14.1.1 主要修復了哪些問題?
A1:主要修復了 14.1 的剎車過於敏感與方向盤左右劇烈擺動的問題,同時提升了對罕見場景的識別與應對能力(如大群騎行者、夜間小動物避讓等)。
Q2:為什麼特斯拉能在 5 天內推送修復?
A2:關鍵在於龐大的車隊資料、快速定位問題場景、雲端的模型訓練與模擬驗證流程,以及成熟的 OTA 部署管線。這使得從發現問題到推送修復的周期可被壓縮到幾天。
Q3:什麼是 Arwen Predictive Layer 和 Zoken?
A3:Arwen 是以大量人類「微決策」訓練出的城市預測層,會依情境觸發更接近人類的駕駛反應。Zoken 是壓縮後的場景 token(例如施工手勢、車道封閉資訊),用於車隊之間的集體學習。
Q4:Robotaxi 商業化的時間點?
A4:根據目前版本節奏與各地測試動作,內部時間窗指向 2025 年第四季作為可能的監管與商業化突破期,但仍取決於後續版本在安全性與舒適性上的穩定度,以及各國監管審核的結果。
Q5:一般車主現在可以期待什麼?
A5:如果你是早期訪問者或開發者測試者,14.1.1 已經在多型號上推送,會看到明顯的場景處理能力提升與一些小細節的改善(如停車場靠近取票機的位置停車)。但大規模推送仍需權衡安全與乘坐舒適性,特斯拉可能會分階段放量。
以上內容為我個人整理與觀察(我是 傻狗),喜歡這種拆解就按讚、轉發、訂閱,我們明天同一時間繼續深挖。汪汪。



