大家好,我是 Chuck。這次我在我的 Model Y(AI4)上拿到 FSD Supervised v14.1 更新,還沒在 Cybertruck 上看到。本文整理這次釋出的重點、我讀 release notes 的重點觀察,以及我接下來要做的安全實測重點。文章會用淺顯方式說明各項改變,讓台灣讀者快速掌握這次更新對日常使用的影響。
Table of Contents
- 版本與環境(我實際拿到的情況)
- 釋出重點總覽(release notes 摘要)
- 抵達選項(Arrival options)解析與影響
- 速度設定變動:新增「Sloth Mode」與右側滾輪調整改變
- UI 與啟動流程的改變(對乘客與後座介面影響)
- Autopilot 頁面觀察與 Cybertruck 備註
- 系統故障處理與人車安全設計
- 內側擋風玻璃殘留提醒(實務小提醒)
- 我接下來要做的事:安全駕駛實測計畫
- 常見問答(FAQ)
- 結論與期待
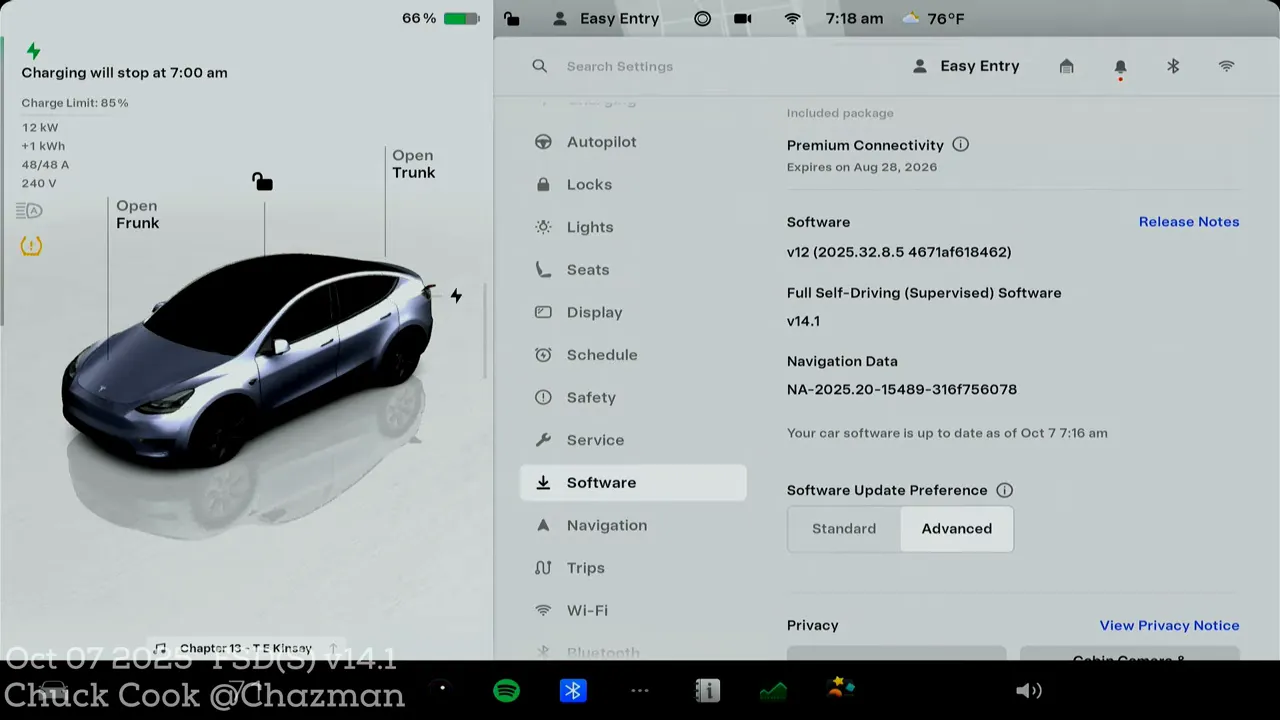
版本與環境(我實際拿到的情況)
在我這台 Model Y AI4 上,實際下載到的版本如下:
- FSD 版本:FSD 14.1
- 分支與編號:32 branch 202532.8.5
- 導航資料:2025.20-15489
- 更新方式:我是開啟 Advanced(進階)模式,軟體直接在手機上顯示可用且自動下載,沒有手動觸發。
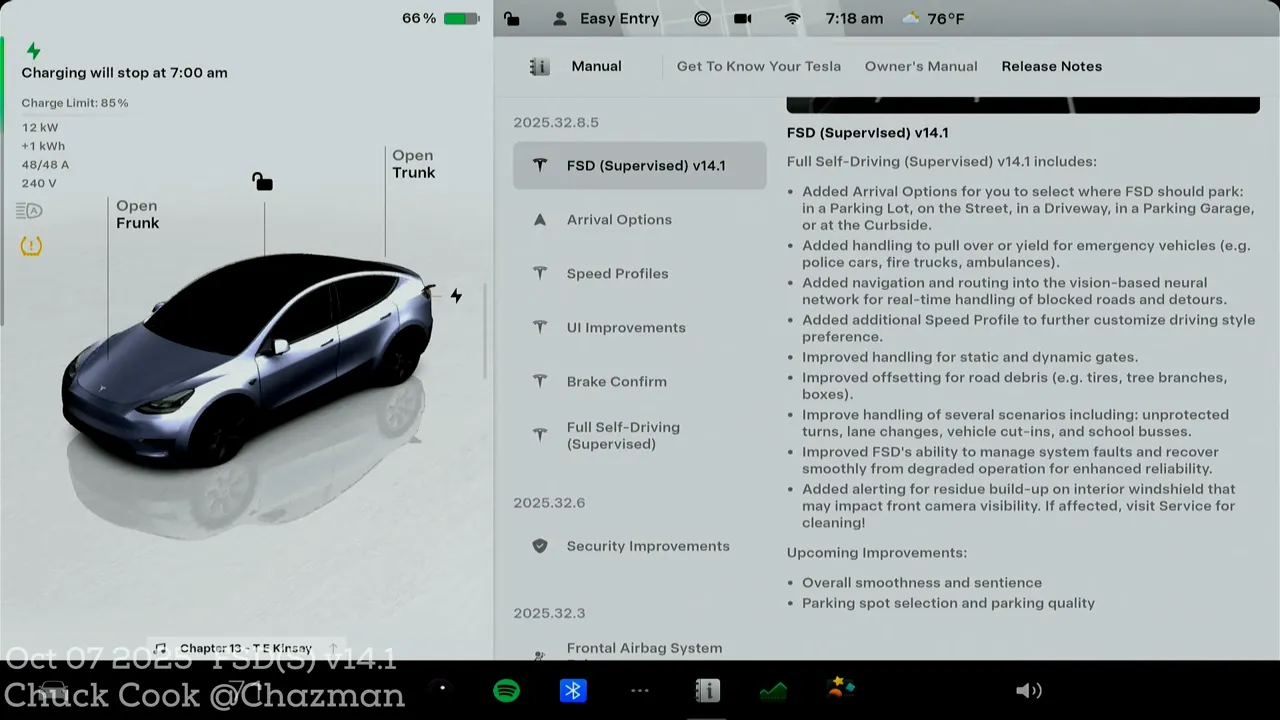
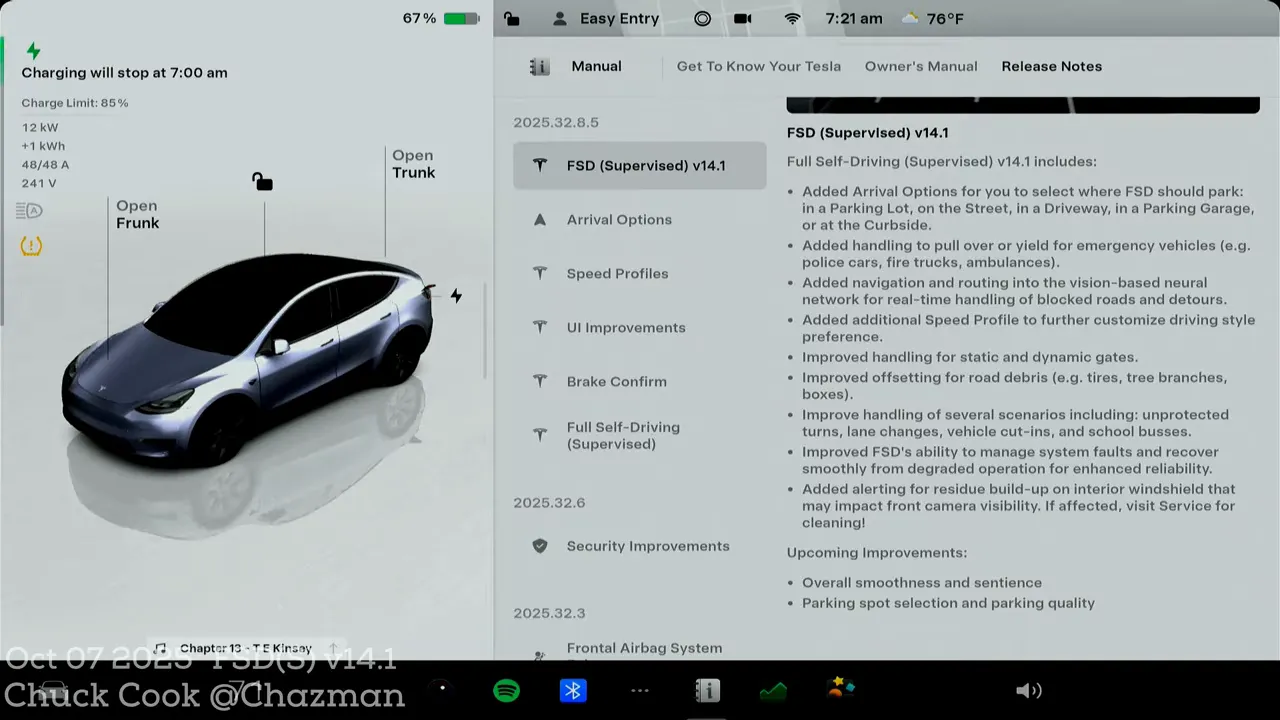
釋出重點總覽(release notes 摘要)
14.1 的 release notes 資訊量不少,以下把我認為對使用者與安全最有感的重點整理出來:
- 抵達選項(Arrival options):可以選擇目的地到達時汽車要怎麼停(停車場、路邊、車道、停車塔、路邊上門 curbside)。對未來 robo-taxi 或後座乘客介面很重要。
- 新增對緊急車輛的停靠/禮讓行為:系統會有更多情況下主動靠邊或讓行。
- 視覺導向的導航/路由強化:routing 更整合進 vision-based network,可在即時發現阻斷或改道時做處理(不像早期單純倚賴地圖資料)。
- 改善靜態與動態閘門處理:例如鐵路道口、社區入口閘門,像我以前測試的小鏈條場景也有機會改善。
- 路面雜物偏移(debris offset):會更注意輪胎、樹枝、紙箱等可致障礙物的偏移處理(沒特別提坑洞)。
- 情境處理改進:包含無保護左轉/右轉(unprotected turns)、轉向變換(turn changes)、車輛切入(cut-ins)、以及學校巴士相關處理。
- FSE(Full Stack Engine?)系統故障管理強化:更平順從降級操作中恢復,強化可靠性(我希望能減少那種突然跳出紅手的驚嚇)。
- 內側擋風玻璃殘留警示:會提醒內側玻璃殘留物,這在 Cybertruck 等車上比較突出(像新車塑料霧氣會在內側玻璃產生殘留)。
- 整體平順度與「sentience(感知/判斷)」的改善:release notes 使用了“sentience”這詞。
- 停車場選擇與停車品質改善:系統在停車場內判斷停位與停車品質會更好。
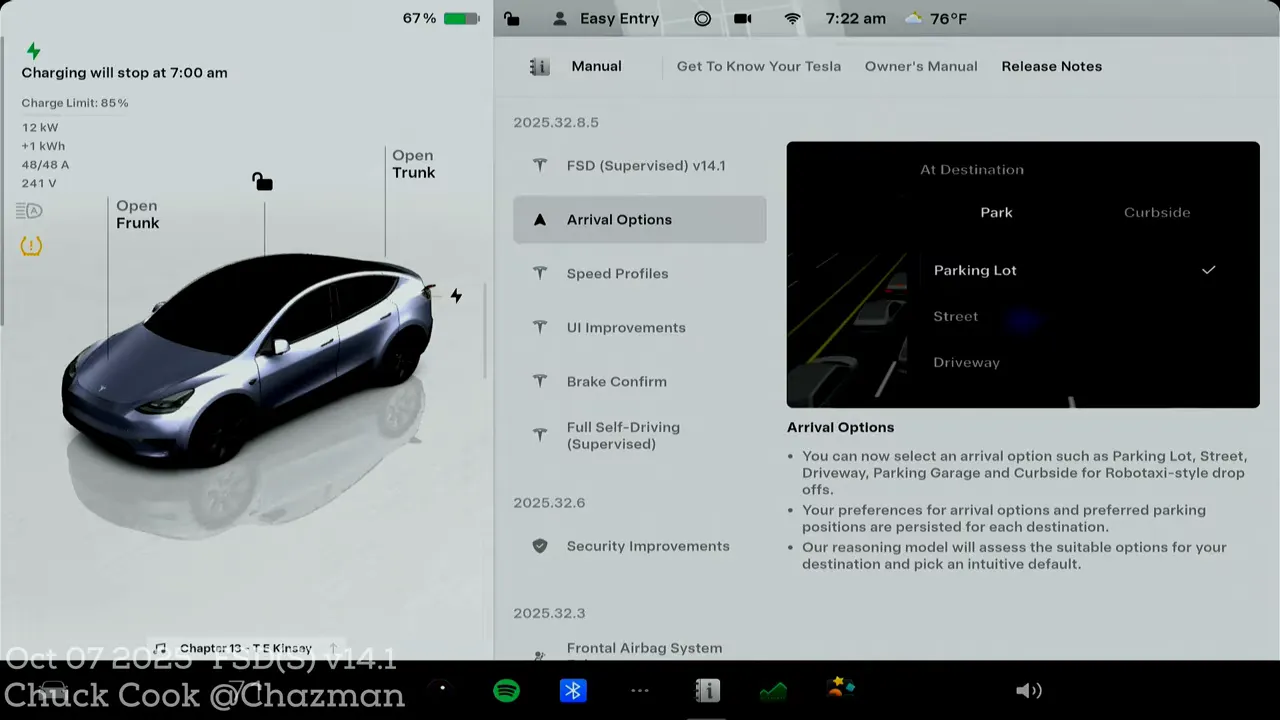
抵達選項(Arrival options)解析與影響
新加入的抵達選項讓系統在到目的地時有更多線索去決定停車位置:停車場、路邊、車道、停車塔、或路邊上下車(curbside)。這對 robo-taxi 的服務品質很重要,但對一般車主來說也能改善到家或到公司時車輛如何停放的行為。
實務上我期待兩件事:
- 系統能更常正確識別我的私人車道並停入(我目前尚未在我的地址看到車子自動開進車道)。
- 當附近發生阻塞或臨時改道時,視覺導向的 routing 能即時調整,而不是單純依賴預先地圖資料。
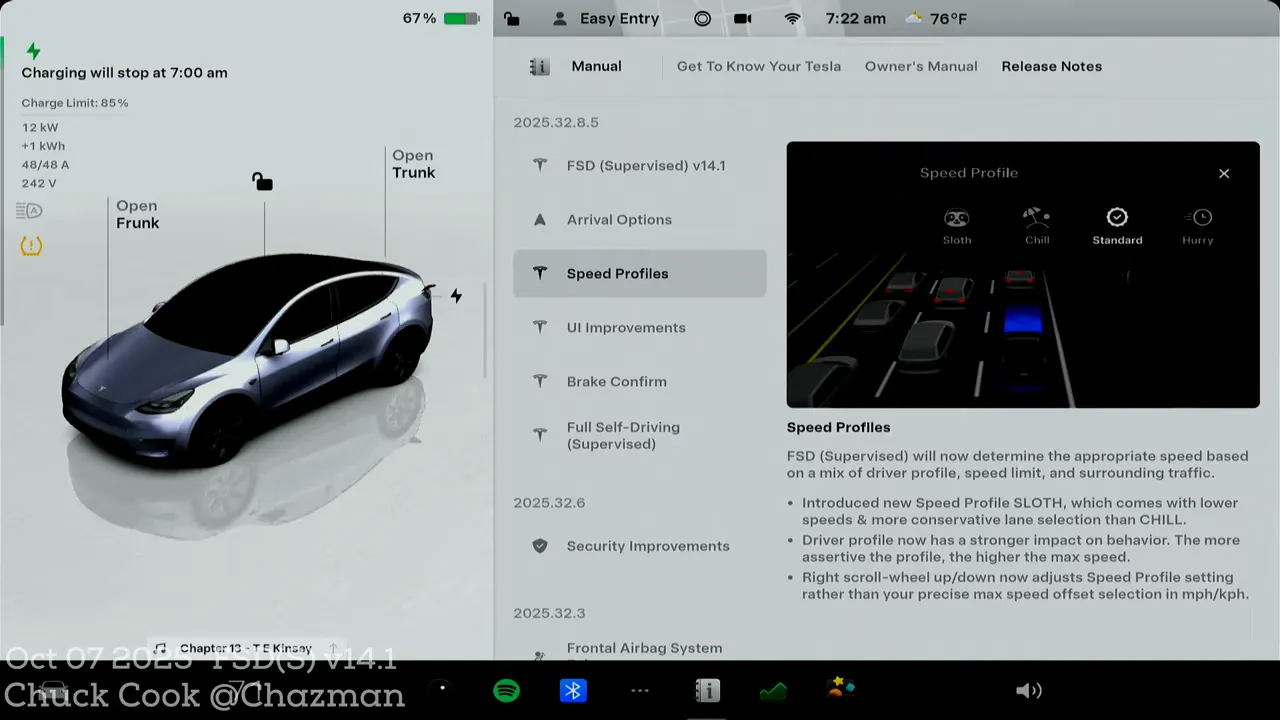
速度設定變動:新增「Sloth Mode」與右側滾輪調整改變
這次新增了一個叫做「Sloth mode」的速度檔,顧名思義比 Chill 還慢。實際使用感受要等實測,但重點還在於:
- 右側滾輪(右滾輪)現在調整的是「速度設定檔(speed profile)」,而非直接改變最大時速。過去很多人用右滾輪調整 max speed,現在這功能被移走或改為只改 speed profile(例如 Standard、Chill、Sloth)。
- 這個變更可能是為了未來 robo-taxi 需要統一行為而預先限制使用者在 FSD 行駛中直接改變車速上限。
UI 與啟動流程的改變(對乘客與後座介面影響)
UI 有幾處值得注意的變動:
- 可以用觸碰螢幕單次啟動自動駕駛(From park 或行駛中),UI 減少了按兩次的步驟,這有利於後座乘客或 robo-taxi 的操作。
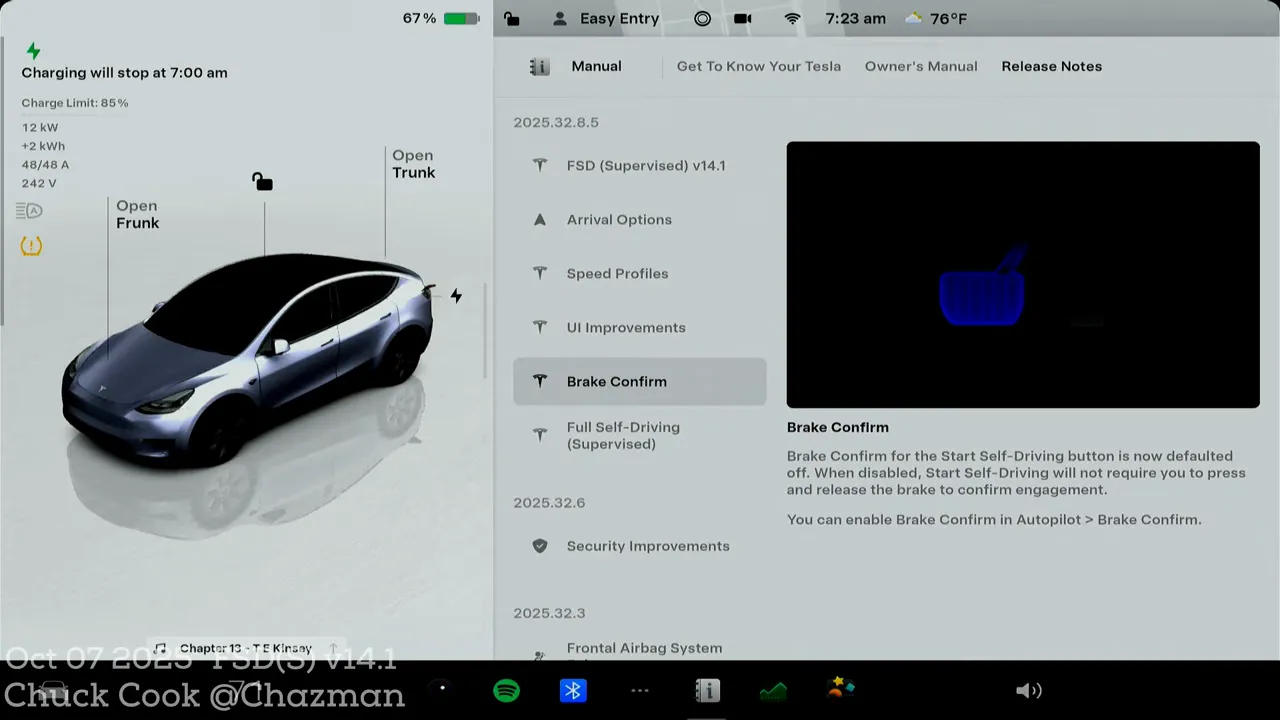
- Brake confirm(剎車確認)選項被移除預設,但仍可在設定中開啟——也就是說系統默認減少了需要駕駛再確認的冗餘步驟。
- 針對隱私/安全會顯示車內攝影機錄影與責任說明。
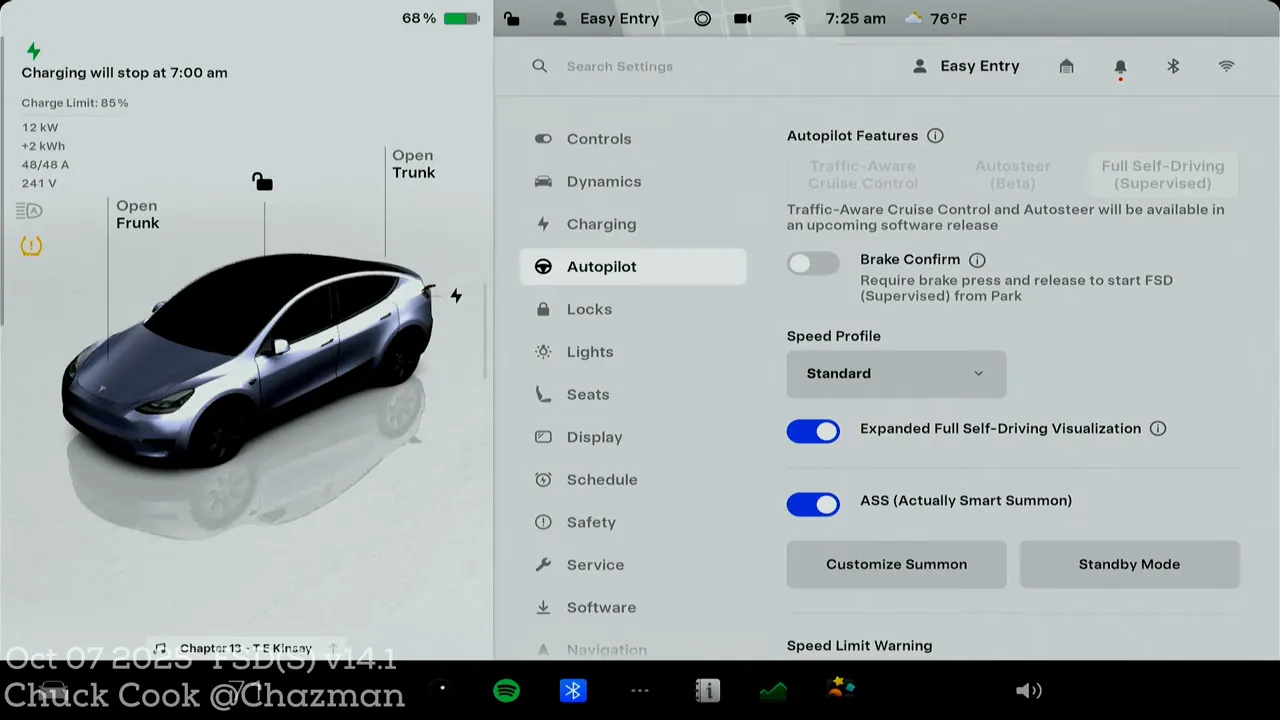
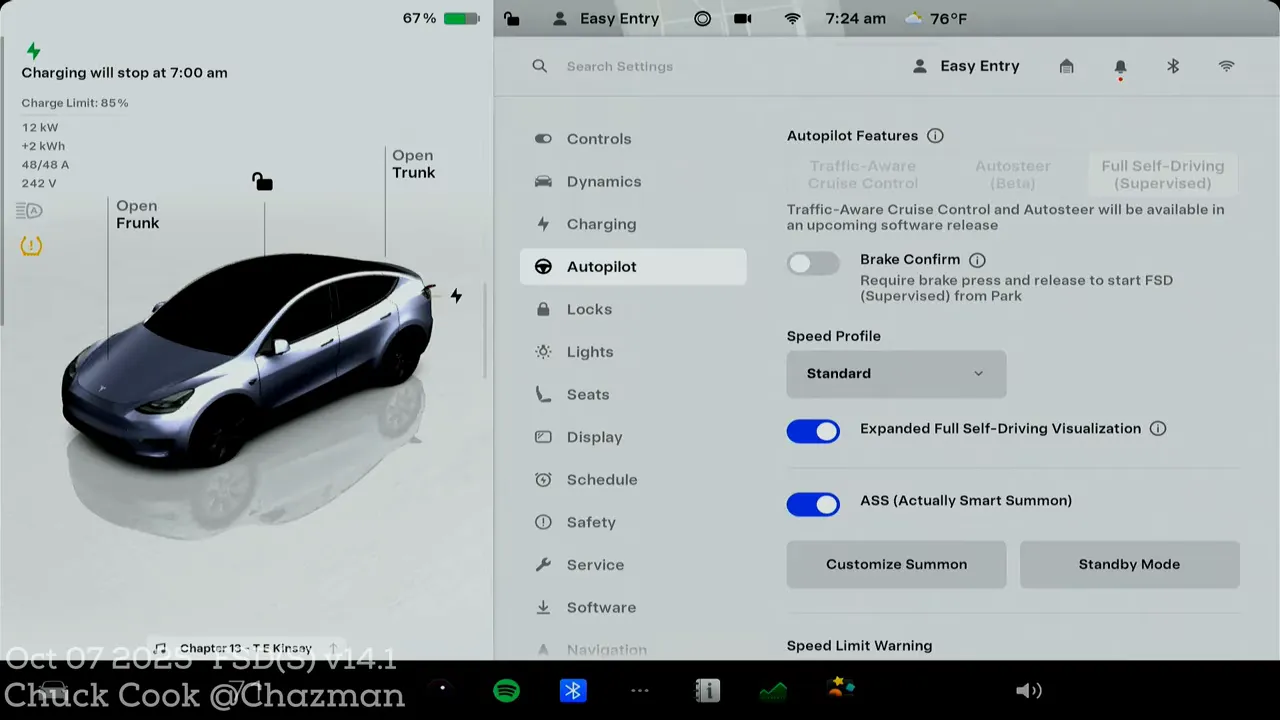
Autopilot 頁面觀察與 Cybertruck 備註
我查看了 Autopilot 設定頁面,發現幾點:
- 在 Autopilot features 下,Full Self-Driving Supervised 是唯一選項。
- 速度設定檔顯示為 Standard(可由此選擇其他設定)。
- Expanded full self-driving visualization(擴充式 FSD 可視化)仍可切換,實際效果沒看到明顯變動。
- Smart Summon 的畫面看起來沒太大變化。
- 註記一點:說明中提到 Traffic-Aware Cruise control(TAC)與 Auto Steer 在未來版本會出現,這對 Cybertruck 使用者特別重要,因為 Cybertruck 早期沒有 TAC/Auto Steer,只有 FSD。
系統故障處理與人車安全設計
release notes 提到 FSE 能更好管理系統故障並平順復原。這點我相當關注:目前當系統出現問題會跳出紅手或要求駕駛介入,對乘客會有強烈驚嚇感。
我希望這次改進包含:
- 在可控情況下更溫和的降級通知(例如先以提示語音與溫和視覺警示替代突如其來的紅手),
- 在無駕駛或駕駛無法馬上接管的情況下,系統能安全靠邊停車或採取預設降級策略。
內側擋風玻璃殘留提醒(實務小提醒)
系統會提示內側擋風玻璃有殘留 buildup(特別是新車或裝潢塑膠蒸氣造成的霧狀殘留)。實務上這類污漬有時會影響前方攝影機視野或偵測能力,提醒去到服務中心固然可以,但自己在熟悉情況下小心清潔(避免傷及攝影機外殼)也是選項。
我接下來要做的事:安全駕駛實測計畫
看完 release notes 後,下一步我會安排一場完整的安全駕駛測試,重點項目包括:
- 測試抵達選項在我家車道與常去停車場的表現(是否能準確停入車道或選擇合理的停位)。
- 在有模擬路障或封路情境(安全的測試環境)下,觀察視覺導向路由如何改道處理。
- 測試面對動態閘門、路面雜物(紙箱、樹枝)與車輛切入行為的反應與偏移距離。
- 觀察學校巴士或類似情境的處理(在合法安全前提下觀察行為)。
- 收集系統故障降級時的提示類型與是否有更平順的處理方式。
常見問答(FAQ)
Q:我什麼時候能拿到 FSD 14.1?
A:更新會分階段推送,先在進階測試者或特定車輛分批上線。我這台 Model Y AI4 已拿到,但 Cybertruck 尚未普遍收到。建議保持 Advanced 模式並留意手機通知。
Q:抵達選項會自動把車停進私人車道嗎?
A:release notes 有提到改善停車場與停車品質,但實際能否進入私人車道取決於系統能否正確辨識地形與 pin 位置。我個人在家還沒看到穩定自動開進車道的情況,要等更多實測數據。
Q:Sloth mode 與 Chill mode 差在哪?
A:Sloth mode 顧名思義會比 Chill 更緩慢,但實際差異與是否影響轉向 aggressiveness 等要靠實際路測驗證。右側滾輪現在用來切換 speed profile,而不是直接改 max speed。
Q:如果把 Brake confirm 預設取消,會不會比較危險?
A:系統仍保留設定讓你選擇是否啟用 Brake confirm(若你想要額外確認步驟可以打開)。預設取消可能是為了讓 robo-taxi 或後座乘客操作更順暢,但駕駛風險認知仍需人來監控。
Q:Cybertruck 使用者應注意什麼?
A:Cybertruck 早期沒有 TAC 或 Auto Steer,僅有 FSD。release notes 中提到 TAC/Auto Steer 會在未來釋出,這對 Cybertruck 使用體驗會有正面影響。
Q:系統故障時車會怎麼做?會自動靠邊停車嗎?
A:release notes 表示改善故障管理與從降級中平順恢復,我猜未來會有更靈活的降級策略(例如在安全情況下靠邊停車)。不過具體行為還要等實測觀察與進一步細節。
結論與期待
FSD Supervised v14.1 在多個面向有實際改進的承諾:從抵達與停車選項、視覺導向的即時路由、閘門與雜物處理,到系統故障管理與 UI 優化。這些改變看得出為未來 robo-taxi 與日常使用做準備,但實際效果仍需道路實測來驗證。
我會在接下來安排一系列安全駕駛測試,把發現的行為、優缺點與實際影片分享給大家。若你有特別想我測的場景(例如學校巴士互動、特定停車場行為),在下方留言告訴我。