
FSD V14 Lite 丟進芝加哥市中心,這本來就是一場硬仗。
不是那種郊區大馬路、車流單純、GPS 清清楚楚的舒服場景,而是芝加哥市中心。多層道路、觀光人潮、公車、臨停、狹窄空間、亂中有序的交通節奏,還有最關鍵的一點,進了 Lower Wacker 之後,GPS 訊號會消失。
這次我就是要把 Tesla FSD V14 Lite 直接丟到這種環境裡,看看它到底有沒有本事撐住。整體結論先講,它的表現真的讓我驚訝,而且最值得注意的,不是單純會不會開,而是在失去 GPS 訊號時還能維持多少穩定度。
目錄
- 影片開頭
- Cybercab 與 Robotaxi:芝加哥篇
- 離開停車位
- 高速道路行駛
- Lower Wacker 行駛
- Michigan Ave
- 閃避測試(第 1 次)
- 道路被擋住(第 1 次)
- 救護車測試
- 道路被擋住(第 2 次)
- 閃避測試(第 2 次)
- 避開停放中的車輛
- 路邊停車 vs. 路緣停車
- FAQ
影片開頭
我一開始就直接下判斷了,FSD V14 Lite 在芝加哥真的很猛。但這種話不能只靠感覺講,所以我安排了一整段路線,從停車位出發,一路進市區、上快速道路、下 Lower Wacker,再進 Michigan Avenue 一帶,最後測停車。
這趟不是單點測試,而是連續情境測試。因為真實世界最難的地方,從來不是某一個單一動作,而是系統在各種不同情境間切換時,能不能持續保持穩定。
我車上也找來 Trent,一位長期在芝加哥追蹤自駕車與 Cybercab 動向的人。這點很重要,因為如果你要談芝加哥自駕測試,最好找一個真的熟這個城市交通脈絡的人一起看,不然很多細節你根本不會注意到。
Cybercab 與 Robotaxi:芝加哥篇
先聊背景。Trent 一直有在追蹤芝加哥當地的 Cybercab 動向,他提到最近雖然不常直接看到那台車,但已經看到一些 Model Y 配上後鏡頭清洗器,這通常被視為 Robotaxi-ready 的明顯訊號。
也就是說,Tesla 很可能正在為芝加哥某種形式的自動駕駛載客服務做準備。
這件事讓這次測試更有意思。因為如果 Tesla 真的想在芝加哥這種地方推 Robotaxi,那它就不能只在簡單路段表現漂亮。它得能處理 Lower Wacker 這種連當地人都會繞暈的地方。
另外,這趟路線本身也很芝加哥。會經過 Chicago Theater、Trump Tower、Willis Tower,還會下到電影迷一看就有既視感的 Lower Wacker。這裡拍過《The Blues Brothers》跟《The Dark Knight》,氣氛本來就夠戲劇化,拿來考 FSD 剛剛好。
離開停車位
測試一開始就不輕鬆。我的車前面有一根 bollard,也就是短柱障礙物,直接卡在前方。這種情況最能看出系統到底有沒有真的理解空間,而不是只會沿著導航藍線往前衝。
結果 FSD V14 Lite 做得很漂亮。它沒有硬切,也沒有猶豫太久,而是先倒車,拉出空間,再等車流安全後切入道路。

這種出停車位的表現,是 V14 Lite 很值得注意的進步點。以前很多版本在這裡不是太保守,就是不知道怎麼規劃退出路徑。這次它一出手就做對,而且做得很自然。
我也順便操作了停車相關選項。畫面左上可以切換目的地到達後的行為,分成 park 跟 curbside。如果選 park,底下還能細分為 parking lot、street、driveway。選 curbside 則沒有更多細項。

這個選單看起來小,但背後代表的是行為意圖。系統到底要找合法停車格、路邊停車,還是只要在路邊臨停放人,這些決策在城市裡差很多。
高速道路行駛
上快速道路之後,V14 Lite 給我的感覺和 12.6.4 很接近,整體是平順、有信心,而且安全的。
它的變換車道和併道都沒有什麼大驚小怪的地方,這裡的重點反而是,它沒有因為進城前的節奏切換而變得不穩。很多系統在停車場、平面道路、高速道路之間切換時,駕駛風格會忽然變掉,但這次沒有。
當然也不是完全沒缺點。我有注意到方向盤有一點點輕微左右擺動,幅度不大,不會煩到讓人受不了,但你感覺得出來。這個問題我之前就提過,這次還是在。
所以如果要簡單總結高速路段,就是成熟、穩、沒什麼驚喜,但也沒出什麼包。真正難的還在後面。
Lower Wacker 行駛
重頭戲來了。
Lower Wacker Drive 對任何導航系統都是麻煩地帶,因為它不是單一平面道路,而是多層結構、匝道交錯、方向判斷複雜。有些建築的車道入口只在某一層能進,選錯層你就整個錯了。
而且進到這裡之後,GPS 訊號會掉。
這正是我這次最想看的重點。不是平面道路會不會轉,而是當系統失去 GPS 這個外部定位依賴時,還能不能靠視覺、地圖融合、慣性感測與路徑推估把車穩穩帶出去。
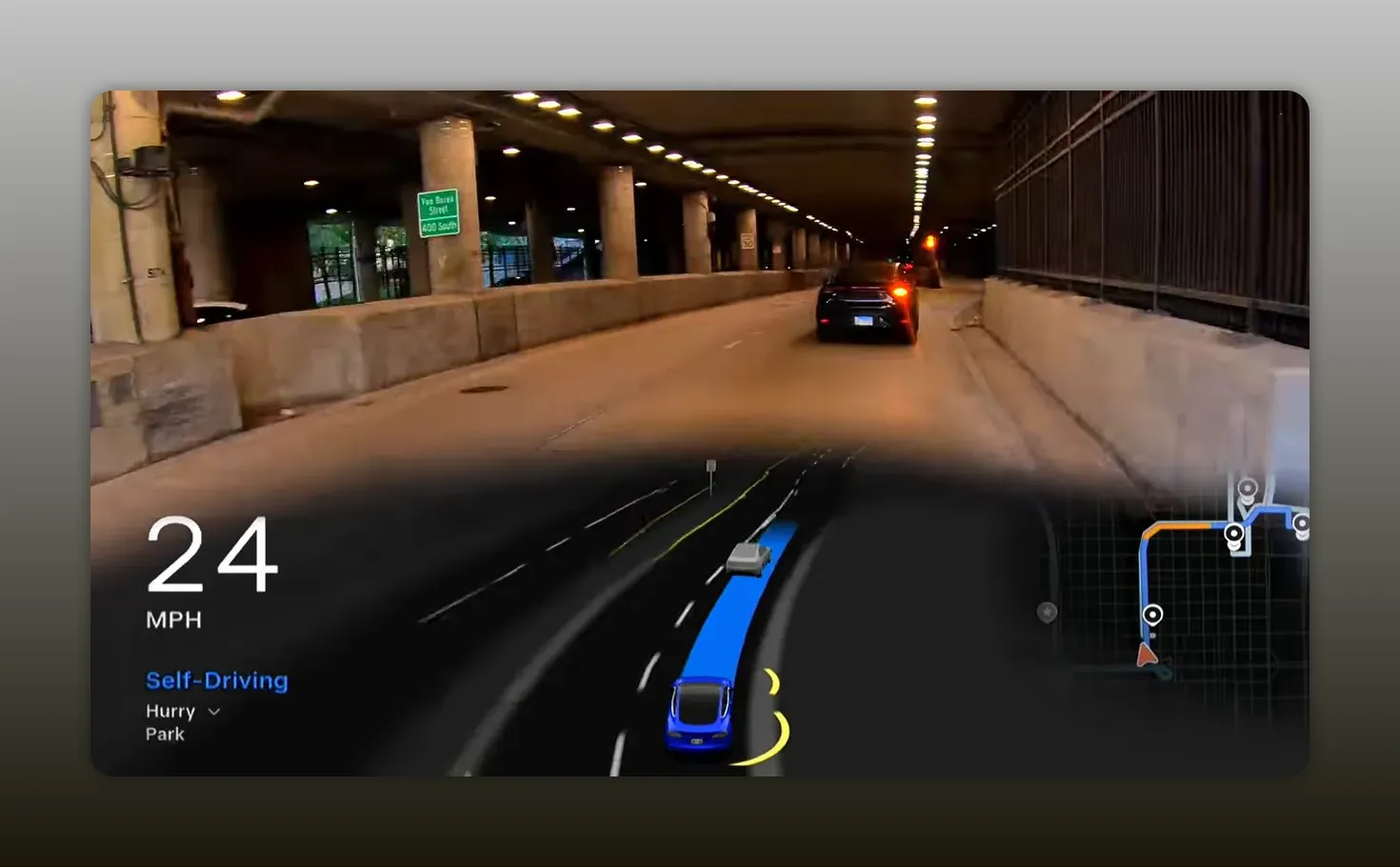
先說好的部分。一般 Lower Wacker 這一層,FSD V14 Lite 其實處理得相當不錯。車道跟隨、紅綠燈停走、跟車邏輯都很順,沒有讓人緊張的亂切或怪異判斷。
但問題在於某些固定麻煩點。像有一個右轉後立刻左轉的地方,它還是會錯過。Trent 也提過,這一直是 Lower Wacker 裡的老問題點。
實際跑到那裡時,車子的左轉燈沒有及時打出來,地圖上的定位也開始出現漂移。很明顯地,一旦 GPS 精度變差,系統對自身相對位置的理解也跟著變得不夠可靠。最後我還是得解除自駕,手動逼它走上正確路線。

這就是這次最值得講的地方。V14 Lite 在失去 GPS 訊號後,不是立刻崩掉。它大多數時間仍然能繼續正常行駛,維持車道、跟隨車流、處理基本交通互動。這代表它對視覺和局部環境理解已經有一定水準。
但只要進入那種需要非常精準路徑定位的地下複雜節點,GPS 缺失的代價就會放大。也就是說,失去 GPS 時,它的戰術層駕駛還行,戰略層定位和路徑決策則還不夠穩。
這兩者差很多。開得穩,不代表走得對。Lower Wacker 正好把這個差異放到最大。
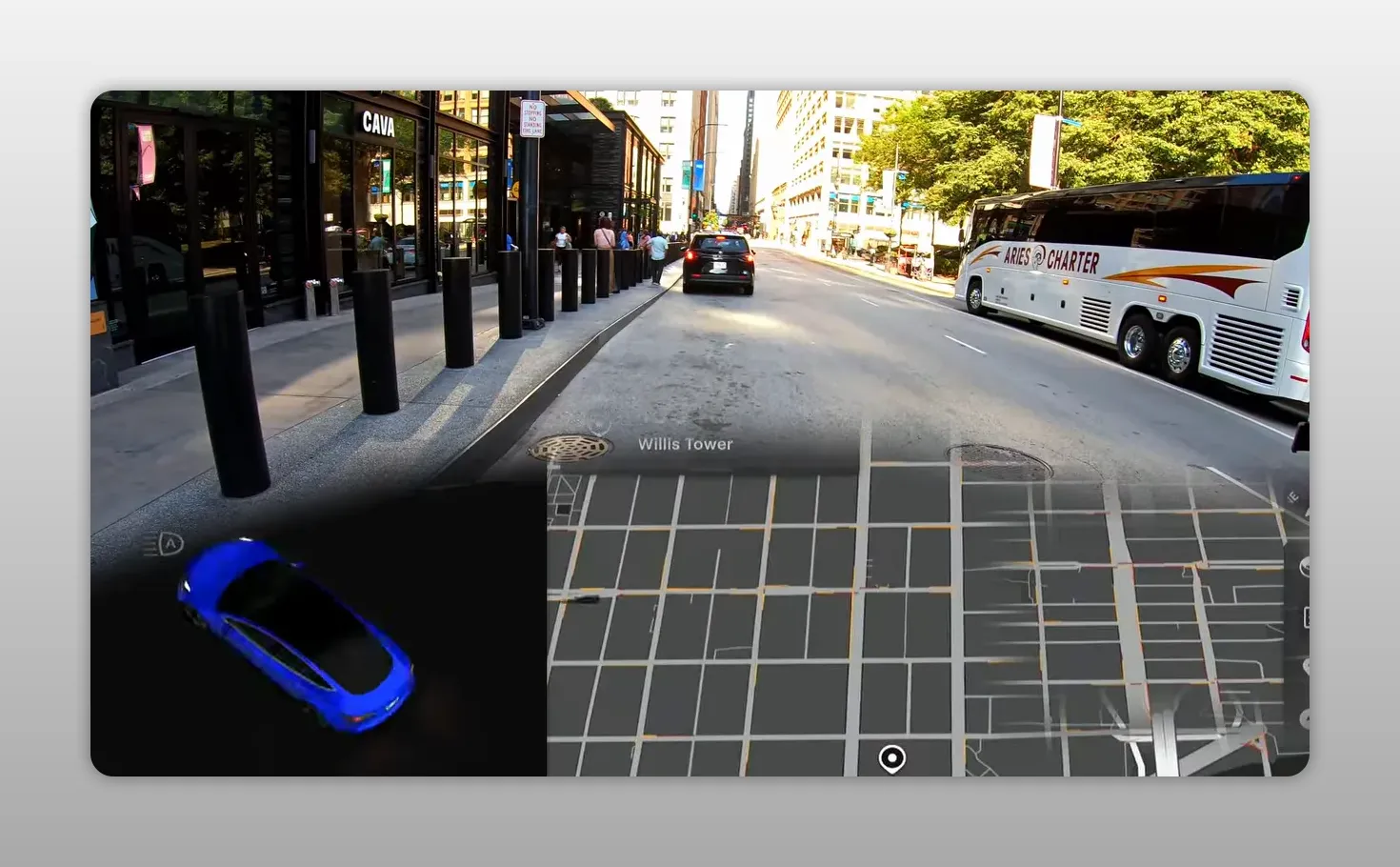
Michigan Ave
從地下回到地面之後,場景立刻變成另一種難。Michigan Avenue 一帶的特色不是多層道路,而是高密度人流、觀光客、公車、短距離紅綠燈、各種臨停,以及很容易出現的模糊意圖。
比如行人準備過街但還沒真正踏出來,自行車從側邊接近,公車停靠後到底會不會再起步,這些都不是單純辨識到目標物就能解決的問題,而是要判斷意圖。
這裡 FSD 的整體感受其實不差。它會為行人減速,也能處理繁忙路口。不過有些細節還是能看出它在思考時會出現那種小小的「搖擺感」,像是方向盤微調、是否要換道的猶豫,畫面上甚至有一瞬間像是要切又取消。

我也提到一個很實際的想法,如果 FSD 未來能讀懂芝加哥這種行人倒數秒數,那它在城市駕駛的流暢度還可以再上去一截。因為有些城市倒數結束後紅燈不會立刻來,但芝加哥很多地方幾乎是零秒就切紅,這對節奏判斷很有幫助。
換句話說,城市駕駛不是只有「能不能停下來」這麼簡單,而是「能不能像老司機一樣知道何時該滑行、何時該補一點、何時其實不用衝」。
閃避測試(第 1 次)
第一個閃避測試其實很實戰。前方有一台公車,而 FSD 很聰明地選擇了繞過去,避免被困在後面。
這裡妙的地方是,繞公車不是你想繞就能繞。太早繞還好,太晚繞就可能涉及不合法超越,或者直接卡在公車前側死角裡。這是一條很細的線。
V14 Lite 這次踩得剛剛好。它不是猛切,而是看準時機過去。這種決策很像人類駕駛中的「有 sense」,你不太會在規格表上看到,但在市區超重要。
如果那台公車再往前一個車身長,它就不該從前面過了,必須乖乖排後面。這也是為什麼我對這次的判斷給高分,因為它不是單純做出動作,而是做出合理時機的動作。
道路被擋住(第 1 次)
接著遇到第一個被堵住的場景。前面有一台打雙黃燈的車,旁邊還有人正要上車。左側雖然有空間,但問題是我們前面很快就要右轉。
所以系統面臨的是兩難。現在繞出去,可能之後回不來。繼續等,又會顯得太保守。

FSD 的反應是先等,然後開始非常緩慢地 creep,也就是往前試探。這個行為我其實能理解,因為它需要更多視野去確認左側空隙、前方轉彎需求,以及行人會不會突然跨出來。
但老實說,這也是我希望它未來更進一步的地方。像這種臨停佔道情境,在芝加哥根本家常便飯。光會慢慢探頭還不夠,還要更果斷、更像一個知道怎麼跟城市交通互相溝通的駕駛。
我們甚至還開玩笑說,真希望有一天 FSD 可以合理地按一下喇叭。不是亂按,是那種「兄弟你擋到整條路了」的文明提醒。
救護車測試
接下來是救護車測試,這段也很有意思。
我們在紅燈、壅塞狀態下聽到警笛聲。理論上,自駕系統遇到緊急車輛應該要辨識並讓道。但實際場景是,前面卡住、旁邊有公車、整條路都塞著。說白了,連人類駕駛也不一定知道此刻要怎麼「讓」。

FSD 這次沒有給我一種它「聰明識別並執行特殊禮讓策略」的明確感受。比較像是,場景本身就沒有多少操作空間,所以它也只能待在原地。
這不代表它做錯,而是代表這一題目前還看不出太多超人表現。畢竟在完全 gridlock 的路口,最好的策略很多時候就是不要亂動。
所以我對這段的評價是中性。沒有出包,但也還談不上真正令人信服的 emergency vehicle handling。
道路被擋住(第 2 次)
第二個堵路情境,比第一個更能考驗耐性。
前方又是打雙黃燈的車,而且這次後面還有公車壓著。系統一度顯得非常猶豫,周圍其他駕駛也開始有情緒了,有人按喇叭,有人手勢示意我們可以繞過去。
這裡就回到一個我一直覺得很真實的問題,你到底該什麼時候接管?
如果你每次看到它有點笨就立刻接手,那你根本測不到它的極限。可如果你永遠不接手,讓它一直做蠢事,那也不是負責任的做法。
Trent 提到一個很好的觀察。每個人對軟體做蠢事的容忍度都會隨著經驗提高。這句話很好笑,但完全正確。你用久了之後,會比較知道哪些笨是無害的,哪些笨是會出事的。
最後這段我稍微補了一點油門,幫它跨過那個卡住的瞬間。不是因為它完全不行,而是因為在那種後有公車、前有臨停的場景,拖太久就會讓整體交通互動變差。
閃避測試(第 2 次)
第二次閃避反而是我更喜歡的一次,因為它更接近「反射神經」。
有輛白車突然決定要停進一個路邊位置,等於直接把原本可走空間收掉。FSD 幾乎是立刻理解狀況,知道前方車輛正在平行停車,於是做出對應反應。

這種場景的難點在於,不只是看到車,而是要理解車的意圖。它不是故障,不是違規逆向,也不是單純減速,而是準備用路邊空位做平行停車。
而 FSD 幾乎在我意識到的同時就做出反應。這種時刻會讓人覺得它很像超人,不是因為它開得多快,而是因為它讀局的速度非常快。
避開停放中的車輛
這段也讓我更確認,V14 Lite 在城市街道的核心駕駛能力,和 12.6.4 相比並不是全面翻新,而是有點像把舊有能力穩定延伸,再把停車與離車位這類尾端動作補強。
也就是說,如果你期待它在每個市區反應上都像換了一顆腦,這次可能不至於。但如果你在意的是整體任務完成度,特別是從起點到終點最後那一下能不能自己收尾,那這版就很有感。
這也讓整趟測試的輪廓更清楚了。開的部分已經相對成熟,停的部分才是新版真正有感升級之處。
路邊停車 vs. 路緣停車
最後我把焦點拉回停車,直接測試 street 跟 curbside 兩種模式到底有沒有差。
第一個測試是 street,也就是路邊停車。車子找到位置後,靠邊停好,而且最重要的是,它自己會打進 P 檔。
這一點和 12.6.4 差很多。舊版常常只是靠邊停住,然後呆在那裡,甚至你等久一點它可能又自己想開走。那種感覺比較像「暫停一下」,不是「我已經完成停車」。
接著我再切成 curbside,想看它會不會只是臨停下客,不真的停進去。結果這次的表現幾乎一模一樣,也是靠邊、停下、進 P 檔。
所以就這次測到的情況來看,street 跟 curbside 至少在這個場景下,行為差異不明顯。
這不代表未來沒有差,而是目前在這段路邊環境裡,它們呈現出來的實際結果很接近。也許更複雜的城市情境或更明確的上下客區,才會把兩者差異拉開。
總結這段,我最滿意的不是它停得多漂亮,而是它終於有「完成閉環」的感覺。從停車格出發,到城市行駛,到目的地停妥,這整條鏈條比以前完整很多。
FAQ
FSD V14 Lite 在芝加哥市中心整體表現如何?
整體表現比我預期更好。高速、公路接市區、一般市中心道路都算成熟,真正的弱點集中在 GPS 消失後的複雜地下多層路段,以及某些需要更果斷決策的臨停堵路場景。
失去 GPS 訊號時,FSD V14 Lite 還能正常開嗎?
可以,但要分層看。基本車道維持、跟車、停走大致仍能進行,代表視覺理解不差。不過一遇到 Lower Wacker 那種需要高精度定位的地下複雜轉向節點,定位漂移就會明顯影響路徑判斷,必要時仍需要人工接管。
這次測試中最值得肯定的進步是什麼?
我會給「離開停車位」和「到點停車」最高評價。V14 Lite 不只會自己找角度退出狹窄停車位,還能在目的地靠邊後自動進 P 檔,這讓整個任務流程終於有真正完成的感覺。
Street parking 和 curbside parking 有差嗎?
就這次測到的情境來看,差異不明顯。兩者最後都做出非常相似的靠邊停車動作,並且自動進入 P 檔。至少在這個芝加哥路段裡,沒有出現一個只臨停、另一個真的停車的明顯分工。
FSD V14 Lite 已經準備好應付芝加哥 Robotaxi 場景了嗎?
如果只看多數地面道路與一般城市互動,它已經很接近可用。但若要上升到 Robotaxi 等級,尤其是在芝加哥這種 GPS 容易失效、道路層級複雜、臨停又多的城市,還需要把地下定位穩定性和複雜堵路決策再補強。
這次實測的最終結論是什麼?
我的結論很簡單,FSD V14 Lite 真的有料,而且不是只有表面上順。它在失去 GPS 訊號後仍能維持一定駕駛能力,這點很關鍵。但 Lower Wacker 的少數致命節點也證明,完全脫離人工介入的芝加哥市中心自駕,現在還差最後幾步。



